
近日,江漢大學本科生吳顯祖、吳顯峰、白亞靖等在賴重遠副教授的指導下,與美國紐約州立大學終身教授、國際模式識別協會(International Association for Pattern Recognition, IAPR)會士、美國電氣和電子工程師協會(Institute of Electrical and Electronics Engineers, IEEE)會士袁浚菘及其博士生欒天宇合作,在三維點云補全領域取得重要突破。相關工作成果以“少點形狀補全(FSC: Few-point Shape Completion)”為題,被人工智能領域頂級會議——計算機視覺與模式識別會議(IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2024)錄用。江漢大學為第一完成單位,這是我校首次在中國計算機學會推薦國際學術會議和期刊目錄下A類會議上發表論文。
CVPR始于1983年,根據2023年7月19日谷歌學術公布的學術期刊和會議影響力排名,CVPR在所有學術刊物中位居第四,僅次于Nature、The New England Journal of Medicine和Science。今年的CVPR會議總共收到了來自全球人工智能相關機構研發人員的11532篇有效投稿,組織了24名高級別領域主席、447名領域主席和9872名審稿人參與審稿,最終有2719篇論文被錄用。
吳顯祖等同學的論文聚焦于自動駕駛和自主機器人領域的三維重建問題。現有的物體點云補全理論與方法都是建立在具有數千個點的點云基礎之上。此情況下的物體點云中的點具有相對穩定的鄰域,能從局部到全局提取物體形狀的多尺度特征。絕大多數現有的補全方法都是充分利用上述點云特性,取得了很好的補全效果。然而,在真實自動駕駛場景下,受到物體尺寸、距離和遮擋等因素的影響,往往能夠獲取到的物體點云數量僅為數十個。此情形下的物體點云中的點不具有穩定的鄰域,且局部信息缺失,進而導致上述補全方法的性能急劇下降,乃至失效。研究開辟了稀疏點云補全這一新的賽道,并在香農信息論的指導下,給出了日常物體三維點云補全所需的最少點的數目。針對稀疏點云局部信息缺失的特點,提出了基于全局注意力機制特征提取和對抗性生成式網路特征修正的少點形狀補全方法。大量實驗證實了提出的方法在最少點情形下實施補全的可行性,其無論是在數千個點的情形下還是在數十個點的情形下都優于現有方法,且在點的數目變化和未知類別物體補全等情形下均具有很好的魯棒性。論文的預印本和相關代碼已分別在arXiv和GitHub網站上公開。
圖1 少點形狀補全方法
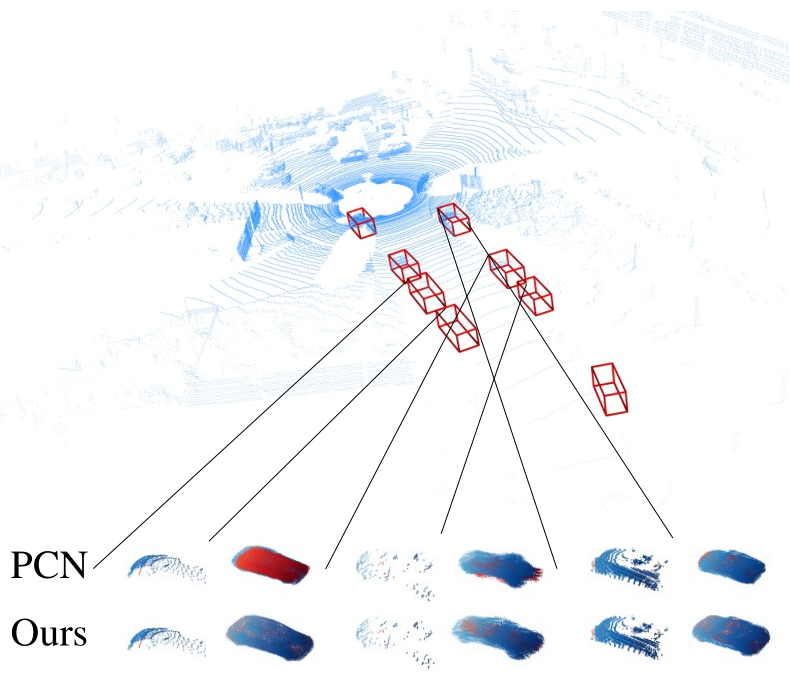
圖2 真實自動駕駛場景下目標點云補全效果
研究團隊吳顯祖、吳顯峰、白亞靖3位同學是人工智能學院2020級本科學生,自進入炳靈學院接受榮譽教育以來,一直在賴重遠副教授指導下從事研究。為更好地指導本科生研究,指導老師們借鑒敏捷項目管理方法,利用每周固定例會評估研究進展,再結合專題會議應對研究中遇到的挑戰。在論文撰寫過程中,鼓勵本科生們采用先進的在線協作式編輯方法,對論文的文字、圖表、參考文獻進行實時更新,極大地提升了寫作效率。該學生團隊獲批的“基于Point-Nerf和Diffusion Model的稀疏點云三維重建“和“基于聯邦學習的自動駕駛汽車點云信息處理隱私安全研究”兩個國家級大學生創新訓練計劃項目,以及“一種基于新型編解碼器網絡的點云補全”、“一種基于點云神經網絡的物體識別方法”兩項江漢大學學生科研項目,為此次高水平論文成果奠定了基礎。
文:炳靈學院
編輯:趙明
審核:江萱